Product
It may be possible to expand the business to other applications like automotive.
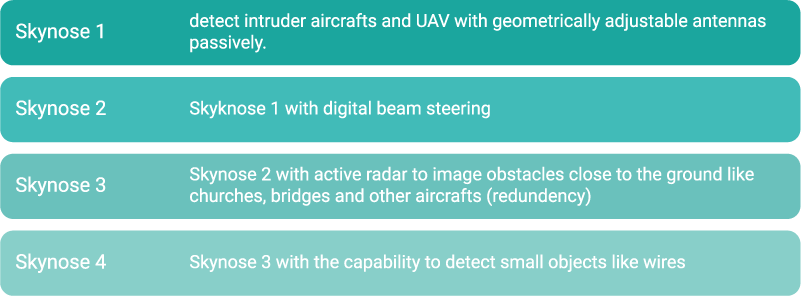
Technology
Detecton of intruder aircrafts and UAV
– ADSB In
– Flarm
– RF Equipment of Drones
Detecton of obstacles close to the ground
Unmanned Aviation
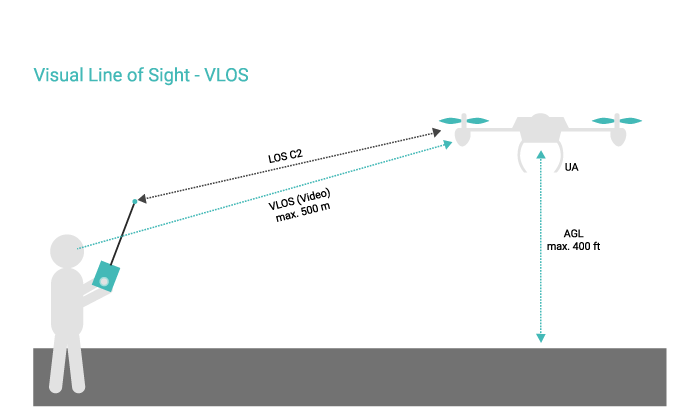
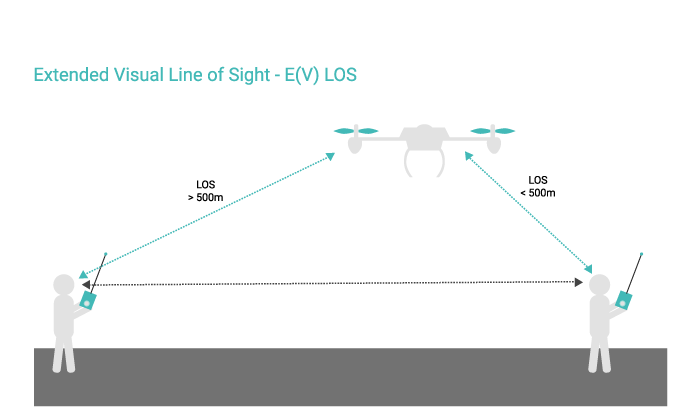
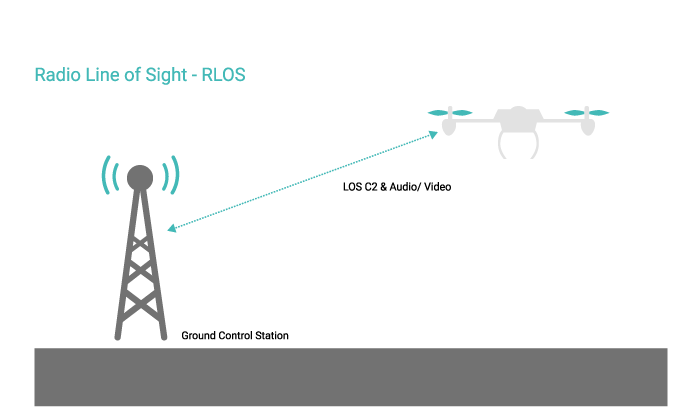
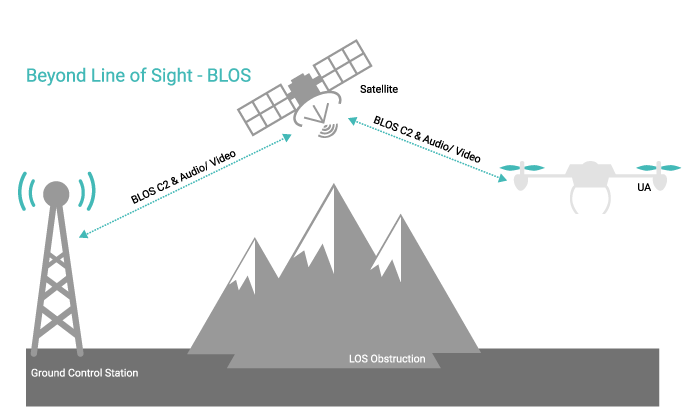
How are UAVs operated?
Lorem consectetur curabitur accumsan sit eu accumsan accumsan praesent auctor blandit a volutpat laoreet volutpat nunc venenatis blandit odio quis consectetur eros ipsum dolor velit dolor consectetur nullam libero pretium eu gravida laoreet sit elit non quisque molestie purus quis congue eros ipsum imperdiet odio venenatis velit vel elit ipsum
Click on the button below to see a detailled illustration:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
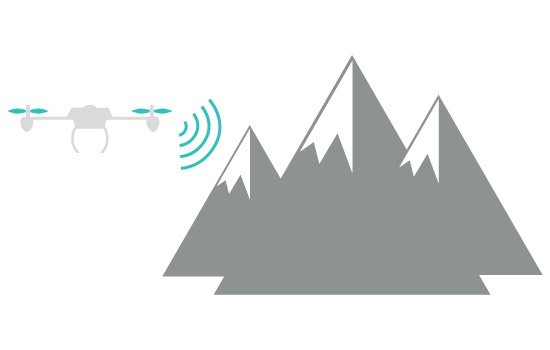
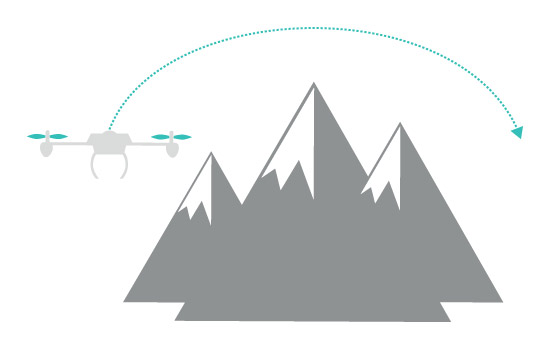
Sense & Avoid
What is Sense & Avoid?
Sense is the sensor part which allows the UAV to understand the surrounding environment.
Avoid is the part which generates a safe path for the UAV to fly through this environment.
Manned Aviation
Lorem ipsum dolor sit amet, consetetur sadipscing elitr, sed diam nonumy eirmod tempor invidunt ut labore et dolore magna aliquyam erat, sed diam voluptua. At vero eos et accusam et justo duo dolores et ea rebum.
